pid什么意思
)对控制器(controller)的输出没有影响。在这种控制系统中,不依赖将被控量反送回来以形成任何闭环回路。
-loopcontrolsystem)的特点是系统被控对象的输出(被控制量)会反送回来影响控制器的输出,形成一个或多个
信号相反,则称为负反馈(NegativeFeedback),若极性相同,则称为正反馈,一般闭环控制系统均采用负反馈,又称
及其控制器或智能控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的PID控制器产品,各大公司均开发了具有PID参数自
进程控制符(PID),英文全称为ProcessIdentifier。也常被称为进程标识符。顾名思义,它是各进程的
p站怎么通过pid找图
程序一运行系统就会自动分配给进程一个独一无二的PID。进程中止后PID被系统回收,可能会被继续分配给新运行的程序。
就是各进程的身份标识。只要运行一程序,系统会自动分配一个标识,不过PID只是暂时唯一的,在进程中止后,这个号码就会被回收,并可能被分配给另一个新进程。
在当今数字化时代,PID(Proportional-Integral-Derivative)是控制工程中常用的术语。它是一种用于控制系统的反馈机制,通过对输入信号进行处理,使系统能够自动调整输出,以达到期望的目标。PID在各个领域都有广泛的应用,比如温度控制、机器人控制、自动驾驶等。本文将介绍PID的意义和应用,并探讨其在实际工程中的作用。
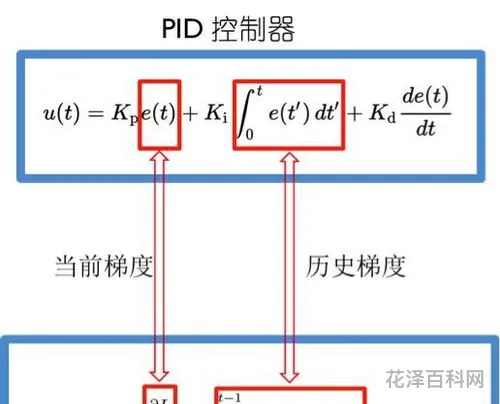
PID控制器由比例(Proportional)、积分(Integral)和微分(Derivative)三个部分组成。比例部分根据当前误差的大小来调整输出,积分部分根据过去误差的累积来调整输出,微分部分根据误差的变化率来调整输出。这三个部分的综合作用使得PID控制器能够快速而准确地调整系统的输出,使其接近期望值。
PID控制在温度控制中有着广泛的应用。以热水器为例,通过测量水温和设定的目标温度之间的差异,PID控制器可以自动调整加热功率,使水温稳定在设定值附近。
pid控制中三个参数的作用
比例部分根据当前倾斜角度误差调整机器人的动作,使其逐渐接近平衡角度;积分部分根据过去倾斜角度误差的累积调整机器人的动作,使其更加稳定;微分部分根据倾斜角度误差的变化率调整机器人的动作,使其动作更加平滑。通过这三个部分的协同作用,PID控制器能够实现自平衡机器人的控制。
通过对PID的介绍,我们可以看到它在控制工程中的重要性和广泛应用。无论是温度控制还是机器人控制,PID都能够通过对误差的处理来实现精确的控制。未来,随着技术的不断发展,PID控制器可能会进一步优化和改进,以适应更复杂的控制需求。
比例部分根据当前温度误差调整加热功率,使温度逐渐接近目标值;积分部分根据过去温度误差的累积调整加热功率,使温度更加稳定;微分部分根据温度误差的变化率调整加热功率,使温度变化更加平滑。通过这三个部分的协同作用,PID控制器能够实现精确的温度控制。
PID控制在机器人控制中也扮演着重要的角色。以自平衡机器人为例,通过测量机器人的倾斜角度和期望的平衡角度之间的差异,PID控制器可以自动调整机器人的动作,使其保持平衡。
前辈科学家们想到的方法是真的巧妙,设置一个积分量,只要偏差存在,就不断地对偏差进行积分(累加),并反应在调节力度上。






添加新评论